Mechanical Engineer
Vex Robotics Competition
For four years I competed in the Vex Robotics Competition, a worldwide robotics competition for engineering students. Each year a new challenge is revealed with specific rules, regulations, and design constraints; contestants must build and program a robot for competition using specified components for autonomous and manual controlled operation. Over the four year span I was able to captain a team each year, resulting in three world championship appearances. Along with serving as team captain of the teams I also served as the design/construction lead and head programmer.
As the design lead I brainstormed, designed, prototyped, and ultimately built the mechanical and electrical systems of the robot. This included design complex mechanical systems such as holonomic & tank drivetrains, four bar, six bar, and scissor linkages, pneumatic mechanisms, and many other complimentary mechanisms. Pictures of some of these mechanisms can be found below. The design of the robots involved initial design concept screening, preliminary design-driving calculations, and rapid prototyping to arrive upon a robust design to be implemented on the robots. Additionally, care was taken to ensure that all components were built in a modular fashion allowing for ease of maintenance during long competitions and the ability to improve/replace subsystems without requiring significant redesign of other systems.
One interesting mechanism that I created was a holonomic drivetrain in which all degrees of freedom of the drivetrain are controllable. This was accomplished using two sets of omni-directional wheels oriented 90 degrees from each other. This allowed for translation in any direction by combining the directional vectors of each set of wheels while also allowing for rotation. This allowed for an extremely maneuverable and easy to operate robot. Photos of this system and others can be seen in the gallery below.
As the head programmer I programmed the robots for both autonomous and user-controlled operation. The robots were programmed using C-based programming language to operate using various sensors such as potentiometers, optical rotary encoders, ultrasonic range finders, and limit switches as well as inputs from wireless remotes. I was able to integrate complex logic and PID control loops to generate autonomous routines and reliable user control.
Often lifting mechanisms such as four bar and scissor linkages were used to lift objects to relatively large heights. Due to hardware limitations of the linkage components and need to hold large loads, PID control was often implemented to keep the lifts at the same height and each side level. This was accomplished by programming traditional PID control with both varying and fixed setpoints.
Overall, my experience in Vex Robotics Competition was a great opportunity for me to develop both leadership and technical skills. Throughout the four years the teams I captained were able to win the following awards in competition:
World Qualifier (x3)
Overall Excellence Award (x5)
Design Award (x2)
Tournament Champion (x6)
Tournament Finalist (x3)
Judges Award (x3)

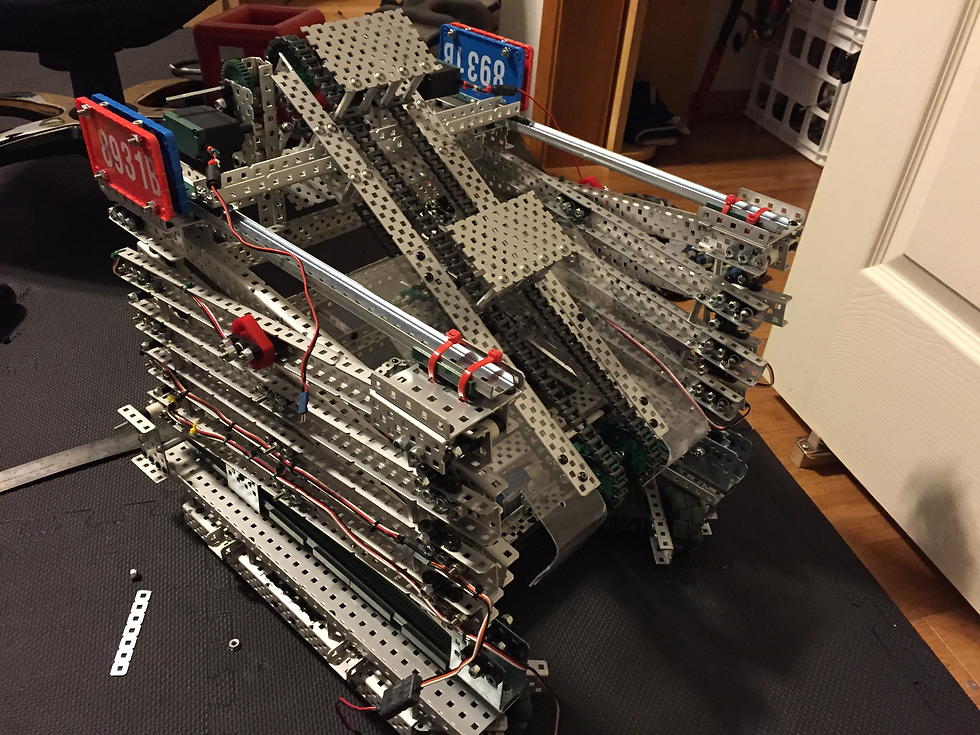
Robot we took to worlds for 2015-16 game, Nothing But Net

Robot we took to worlds for 2013-14 game, Toss Up
Robot used to compete in the 2014-15 game, Skyrise
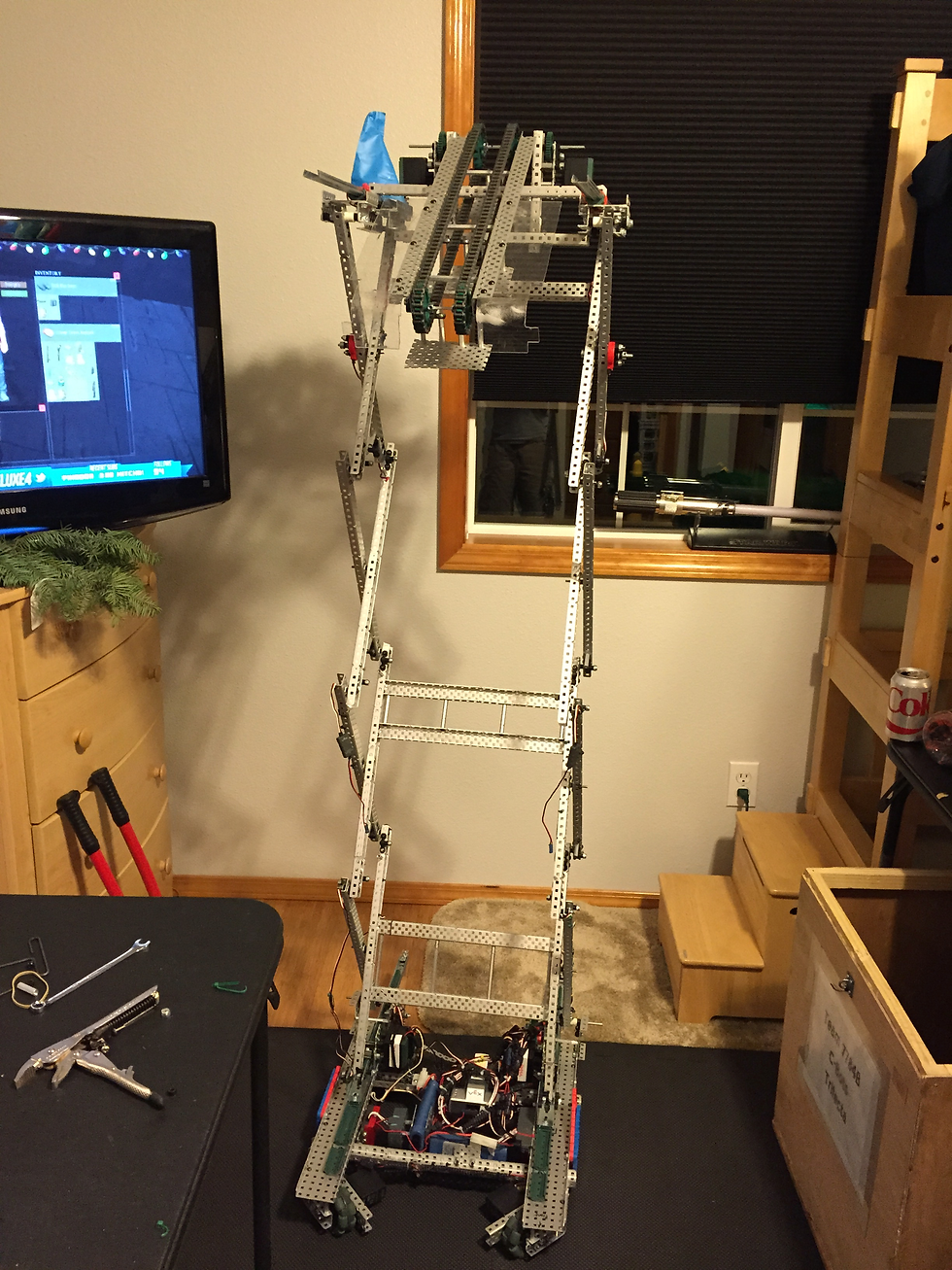
Robot used to compete in the 2014-15 game, Skyrise

Holonomic drivetrain

Lifting mechanism for gear-driven scissor lift

Pneumatic-actuated claw

Rack-driven scissor lift

Bottom-view of holonomic drive

Robot used in 2013-14 game, Toss Up

Robot used to compete in the 2014-15 game, Skyrise

Prototype gear train for 2015-16 game, Nothing But Net

Lifting mechanism for gear-driven scissor lift